

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Hybrid Vehicle Using Internet of Things (IOT)
Authors: Dr Ramakotaiah Maddumala
DOI Link: https://doi.org/10.22214/ijraset.2024.62347
Certificate: View Certificate
Abstract
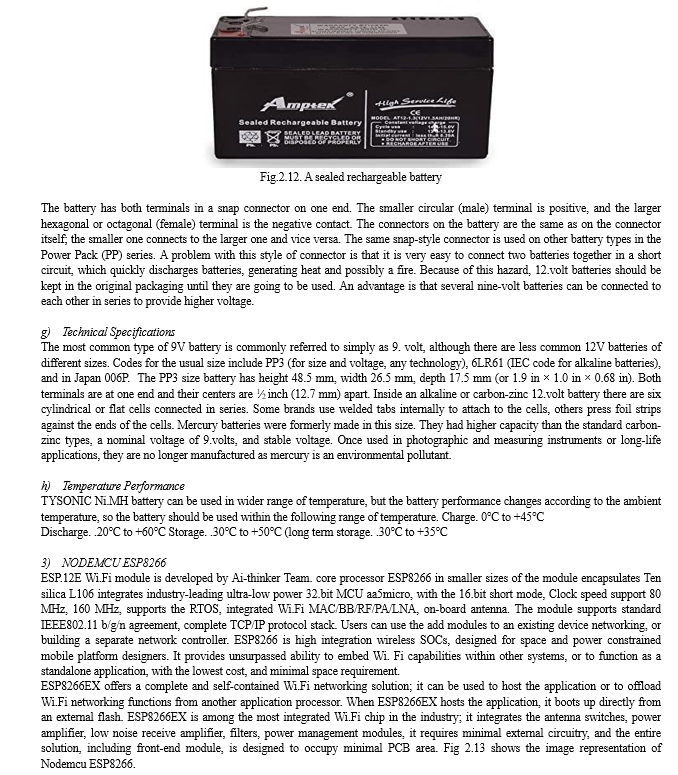
Energy crisis and pollution caused by vehicle emissions are one of the most important issues in the present society. Due to the charging time of battery of electric vehicle, requirement of charging on board is explored as option. This project deals with the design of a hybrid model of a solar and wind, which uses the battery asits storage system. This system allows the two sources to supply the load separately or simultaneously depending on the availability of the energy sources. The power generated from the wind and solar is fluctuating in nature. The system obtains maximum solar energy during day time and it produces 12 Watts electric power. Here we are using 12V, 1.Amp solar panel and maximum wind energy during the night time because the wind blows more at night and it produces 12V, & 1.Amp totally it produces 12Watts per hour in Night Time compared to day time. Therefore, battery of the vehicle can be charged by using hybrid energy system. For full charge of battery it takes 4.Hours, with these power rating devices (Solar panel and Wind power). Along with these parameters we are including some more features like normal accidents and fire accidents detection and sending the information automatically using IOT Technology with mobile charging feature in the vehicle and it runs with the help of generated power from natural resources without emitting any flue gases. By using these types of smart hybrid vehicle, we can save our environment and resources.
Introduction
I. INTRODUCTION
Integration of renewable energy sources such as Solar PV (SPV) and wind energy into main grid is given higher priority with higher depletion rate of fossil fuel resources. With the seasonal variation of solar and wind energy potential, it is difficult to increase the renewable energy.
This makes it essential to amalgamate an energy storage which can absorb the fluctuations up to a certain extent. Recently, a number of studies have focused economic and environmental prospect of vehicle.
Uncertainty of main grid due to changes in demand, renewable energy potential and availability of vehicles makes it difficult to optimize renewable energy systems with vehicle.
A number of case studies that are conducted in different parts of the world in order to evaluate the economic feasibility of a vehicle in smart energy systems. These publications report that vehicle support to integrate renewable energy sources while absorbing the fluctuations of the demand. Numerous difficulties are reported in optimizing such systems.
However, it was observed that most of the mathematical models have been developed for simplifying the basic problem. It’s assumed that, electric.
Driven vehicles are used during the day time, cost of grid electricity remains constant, daily/weekly fluctuations will maintain throughout the year etc. In order to address both the aforementioned limitations, a novel simulation.based optimization algorithm is introduced in this project.
A. Renewable Energy Model
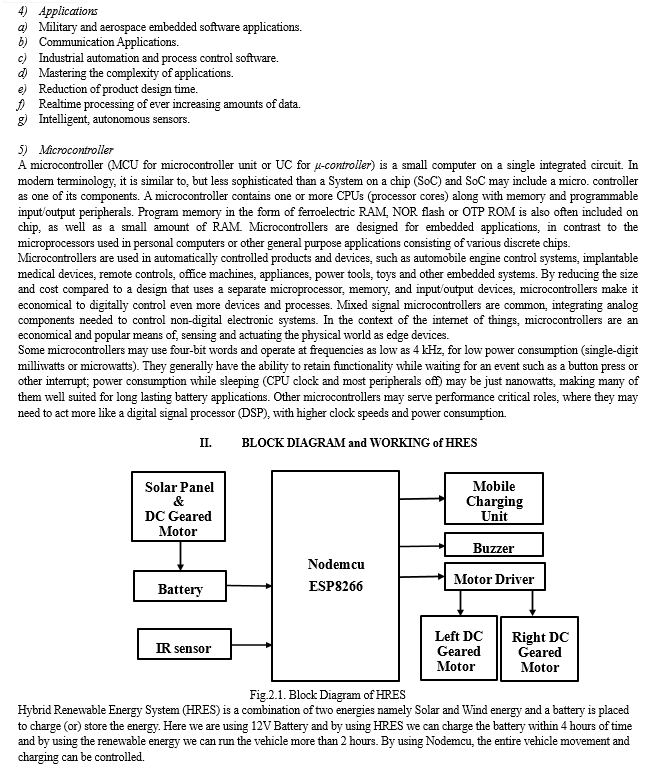
Renewable energy component of the Hybrid Renewable Energy System (HRES) consists of SPV panels and wind turbines. Hourly, solar irradiation on a horizontal plane at Hamartoma, a south coastal location of Sri Lanka is used in this project. An isotropic model is used to convert the hourly horizontal solar irradiation into a tilted hourly solar irradiation. Renewable energy model is as shown in the below Fig 1.1
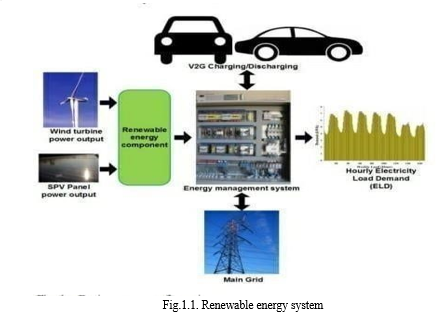
Energy interaction with vehicles mainly depends on willingness to purchase electricity by the vehicle owner, State of Charge (SOC) of the battery banks of EV/PHV. In addition to that wear cost of battery bank also influences the energy interaction that depends on the type of battery, capacity of the vehicle fleet and the rate of charge/discharge. There are number of factors which control the energy flow among main grid (ESP)and vehicle fleet. COE of the main grid (ESP provider), maximum number of electricity units that can be taken from main grid (upper bound for energy inflow) or given to the main grid (upper bound for energy outflow) can be taken as major parameters which influence the optimum solution to arrive. In addition, the profit margins are to be maintained when charging and discharging EV/PHEV, location of vehicle etc., are also becoming vital. It is an extensive task to consider the sensitivity of all the aforementioned factors.
These results clearly depict that it is economical to utilize parking slots in urban areas as vehicle charging. Gradual increase in vehicle station size and wind turbine capacity can be observed with the increase of COE. Furthermore, the capacity has increased its size significantly from eight vehicles to forty vehicles. This facilitates more interaction with both vehicle and main grid. Although, interaction with both grid and vehicle increases with the increase of COE renewable energy wasted due to limitations in grid integration and vehicle charging is increasing. In addition, these results clearly show that cost of renewable energy sources, and vehicle facility needs to be significantly low when compared to COE in order to become energy interactions.
B. Embedded Systems
An Embedded system is a special purpose system in which the computer is completely encapsulated by or dedicated to the device or system it controls. Unlike a general purpose computer, such as a personal computer, an embedded system performs one or a few predefined tasks, usually with very specific requirements. Since the system performs specific tasks, and the design engineers can optimize it by reducing the size and cost of the product.
Personal digital assistants (PDAs) or handheld computers are generally considered as embedded devices because of the nature of their hardware design, even though they are more expandable in software terms. With the introduction of the OQO Model 2 of the Windows XP operating system and ports such as a USB port both features usually belong to "general purpose computers".
Physically, embedded systems range from portable devices such as digital watches and MP3 players, to large stationary installations like traffic lights, factory controllers, or the systems controlling nuclear power plants. In terms of complexity, embedded systems can be controlled with a simple single microcontroller chip, to very complex multiple units, peripherals and networks mounted inside a large chassis or enclosure.
Conclusion
A. Conclusion This project uses an optimized energy system namely Hybrid Renewable Energy System (HRES) which helps us to reduce pollution and also to increase the Lifetime of the battery. Here we are using Solar and Wind based charging system through which the entire system depends on Renewable energy system which makes the system feasible to work for a long period. Using These kind of smart hybrid vehicles may assure Sustainable development and also reduce the Global Warning through which our Earth temperature changes Drastically. B. Future Scope Smart hybrid vehicle is an advanced driving technology, which combines the power generated by the solar and wind energy to enhance the Lifetime of a vehicle. Based on the Atmospheric conditions this kind of vehicle depends on Solar and Wind energies to run the vehicle and generate the power using any of the energy separately (or) simultaneously. Smart hybrid vehicles have the potential to save fuel consumption and reduce the emission of pollutants. The rise in fuel prices and awareness about the vehicle emissions into the atmosphere is boosting the global smart hybrid vehicle market. Hybridization is a method of reducing emission of carbons and complying with the stringent regulatory norms that\'s to be introduced by various countries that are present in the globe. It is estimated that if the popularity of Hybrid vehicles increases then the sales and production hybrid vehicles could potentially make Fuel/gas cars obsolete in the next 10 to 15 years.
References
[1] F. Steinke, P. Wolfram, and C. Hoffmann, “Grid vs. storage in a 100% renewable Europe,” Renew. Energy, vol. 50, pp. 826–832, 2013. [2] B. V. Mathieson, H. Lund, and K. Karlsson, “100% Renewable energy systems, climate mitigation and economic growth,” Appl. Energy, vol. 88, pp.488–501, 2011. [3] H. Lund and B. V. Mathieson, “Energy system analysis of 100% renewable energy systems. The case of Denmark in years 2030 and 2050,” Energy, vol. 34, pp. 524–531, 2009. [4] D. Dillinger, S. Gerda, and M. Weichel, “Integration of intermittent renewable power supply using grid-connected vehicles . A 2030 case study for California and Germany,” Appl. Energy, vol. 104, pp. 666– 682, 2013. [5] W. Liu, W. Hu, H. Lund, and Z. Chen, “Electric vehicles and largescale integration of wind power . The case of Inner Mongolia in China,” Appl. Energy, vol. 104, pp. 445–456, 2013. [6] B. Soares M.C. Boba, A. Sokol, and R. Schaeffer, “Plug.in hybrid electric vehicles as a way to maximize the integration of variable renewable energy in power systems. The case of wind generation in northeastern Brazil,” Energy, vol. 37, pp. 469–481, 2012. [7] S. Belledom, R. Benders, S. Pegram, and H. Moll, “Electric cars and wind energy. Two problems, one solution? A study to combine wind energy and electric cars in 2020 in The Netherlands,” Energy, vol. 45, pp. 859–866, 2012. [8] G. S. Pannu, M. D. Ansari, and P. Gupta, “”design and implementation of autonomous car using raspberry pi.” international journal of computer applications 113,” no., vol. 9, 2015. V. N. Kumar, V. S. Reddy, and L. P. Sree, “”design and development of accelerometer based system for driver safety.” international journal of science,” Engineering and Technology Research (IJSETR), vol. 3, p. 12,2014. [9] C. Hahn, S. Feld, and H. Schroter, “Predictive collision management for time and risk dependent path planning,” in Proceedings of the28th International Conference on Advances in Geographic Information Systems, ser. SIGSPATIAL ’20. New York, NY, USA: Association for Computing Machinery, 2020, p. 405–408. [Online]. Available:https://doi.org/10.1145/3397536.3422252 [10] G. N. A. H. Yar, A.-B. Noor-ul Hassan, and H. Siddiqui,“Real-time shallow water image retrieval and enhancement for low-cost unmanned underwater vehicle using raspberry pi,” in Proceedings of the 36th Annual ACM Symposium on Applied Computing, ser. SAC ’21. New York, NY, USA: Association for Computing Machinery, 2021, p. 1891–1899. [Online]. Available: https://doi.org/10.1145/3412841.3442060 [11] A. F. B. A. de Oliveira and L. V. L. Filgueiras, “Developer assistance tools for creating native mobile applications accessible to visually impaired people: A systematic review,” in Proceedings of the 17th Brazilian Symposium on Human Factors in Computing Systems, ser. IHC 2018. New York, NY, USA:Association for Computing Machinery, 2018. [Online]. Available:https://doi.org/10.1145/3274192.3274208 [12] S. L. Fong, D. C. W. Yung, F. Y. H. Ahmed, and A. Jamal, “Smart city bus application with quick response (qr) code payment,” ser. ICSCA ’19.New York, NY, USA: Association for Computing Machinery, 2019, p.248–252. [Online]. Available: https://doi.org/10.1145/3316615.3316718 [13] G. K. Gudur, A. Ramesh, and S. R, “A vision-based deep on-device intelligent bus stop recognition system,” in Adjunct Proceedings of the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2019 ACM International Symposium on Wearable Computers, ser. UbiComp/ISWC ’19 Adjunct.New York, NY, USA: Association for Computing Machinery, 2019, p.963– 968. [Online]. Available: https://doi.org/10.1145/3341162.3349323 [14] D. Saha, M. Shinde, and S. Thadeshwar, “Iot based air quality monitoring system using wireless sensors deployed inpublic bus services,” ser. ICC ’17. New York, NY, USA: Association for Computing Machinery, 2017. [Online]. Available:https://doi.org/10.1145/3018896.3025135 [15] M. Kumar, “R., and dr,” R. Senthil. Effective control of accidents using routing and tracking system with integrated network of sensors, vol. 2,p. 4, 2013. [16] R. Liu, Z. Yin, W. Jiang, and T. He, “Wibeacon: Expandingble location-based services via wifi,” in Proceedings of the27th Annual International Conference on Mobile Computing and Networking, ser. MobiCom ’21. New York, NY, USA: Association for Computing Machinery, 2021, p. 83–96. [Online]. Available:https://doi.org/10.1145/3447993.3448615 [17] J. J. T. Dai, X. Bai, and Z. Shen, “Mobile phone based drunk driving detection pervasive computing technologies for healthcare. 2010, 4thinternational ieee conference,” p, vol. 1, March 2010. [18] H. Chen, Y. Chiang, F. Chang, and H. Wang, “Toward real-time precise point positioning: Differential gps based on igs ultra rapid product. Sice annual conference,” The Grand Hotel, Taipei, Taiwan, August, vol. 18. [19] X. Liu, X. Xu, X. Chen, E. Mai, H. Y. Noh, P. Zhang, andL. Zhang, “Individualized calibration of industrial-grade gas sensors inair quality sensing system,” ser. SenSys’17. New York, NY, USA:Association for Computing Machinery, 2017. [Online]. Available:https://doi.org/10.1145/3131672.3136998 [20] A. T. Duchowski, S. J¨org, T. N. Allen, I. Giannopoulos, and K. Krejtz,“Eye movement synthesis,” in Proceedings of the Ninth Biennial ACMSymposium on Eye Tracking Research & Applications, ser. ETRA ’16.New York, NY, USA: Association for Computing Machinery, 2016, p.147–154. [Online]. Available: https://doi.org/10.1145/2857491.2857528
Copyright
Copyright © 2024 Dr Ramakotaiah Maddumala. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET62347
Publish Date : 2024-05-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online